I’m happy to announce that paper “Coordination of Autonomous Vehicles: Taxonomy and Survey” has been published on ACM Computing Surveys! It took almost 2 years (:O), but here it is, finally :)
It is a joint work with Franco Zambonelli and Giacomo Cabri with the ambition to shed light on the issue of coordination of autonomous vehicles to achieve cooperative driving, and the tradeoff between coordination enforcement and the degree of autonomy that vehicles have while participating in collective decision making.
In brief, the paper first categorises traffic-related problems in a bi-dimensional taxonomy stemming from concurrency and coordination research (Table 1).

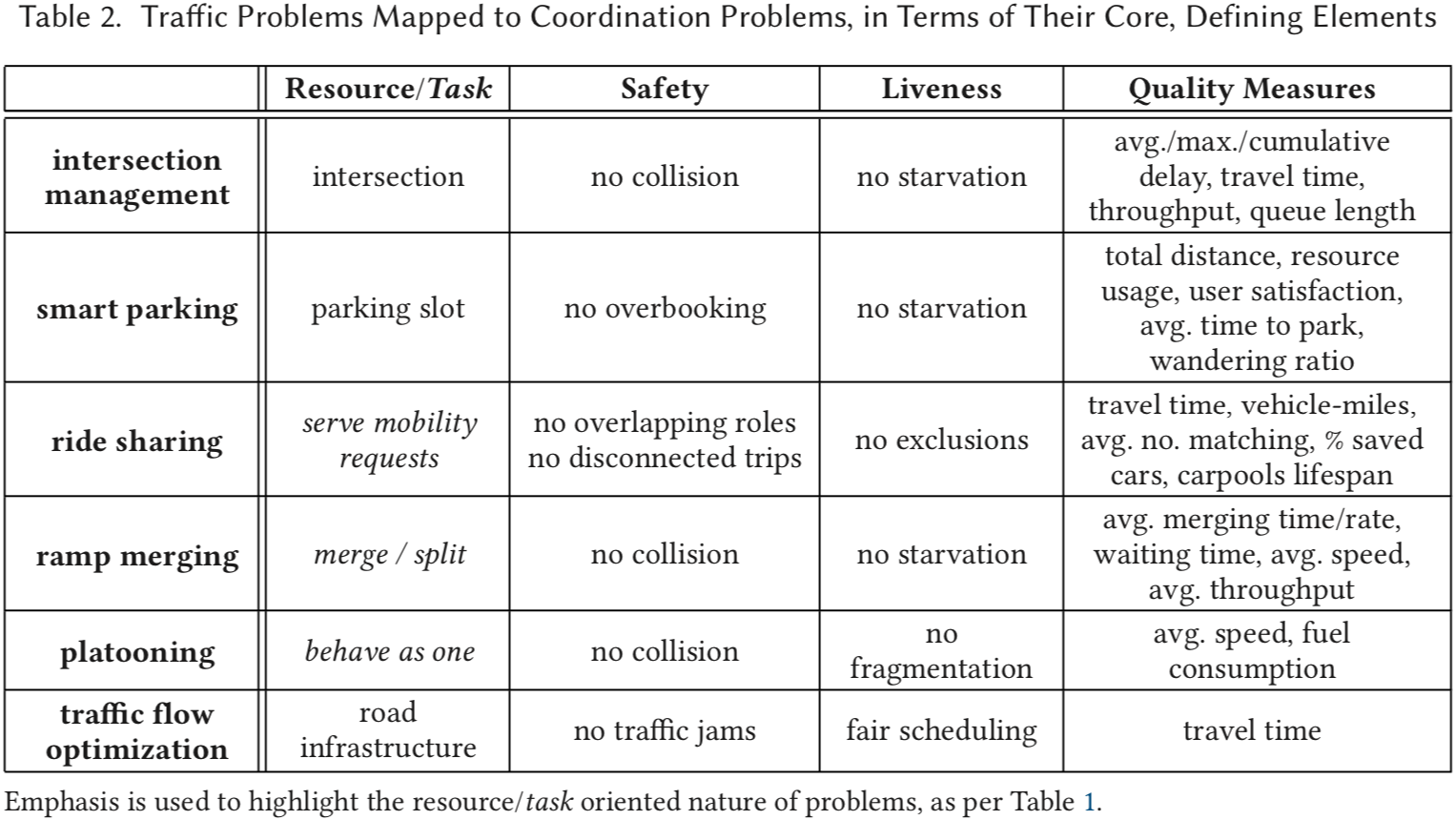
Then we describe such problems in view of typical concurrency and coordination terms, such as safety and liveness properties (Table 2).
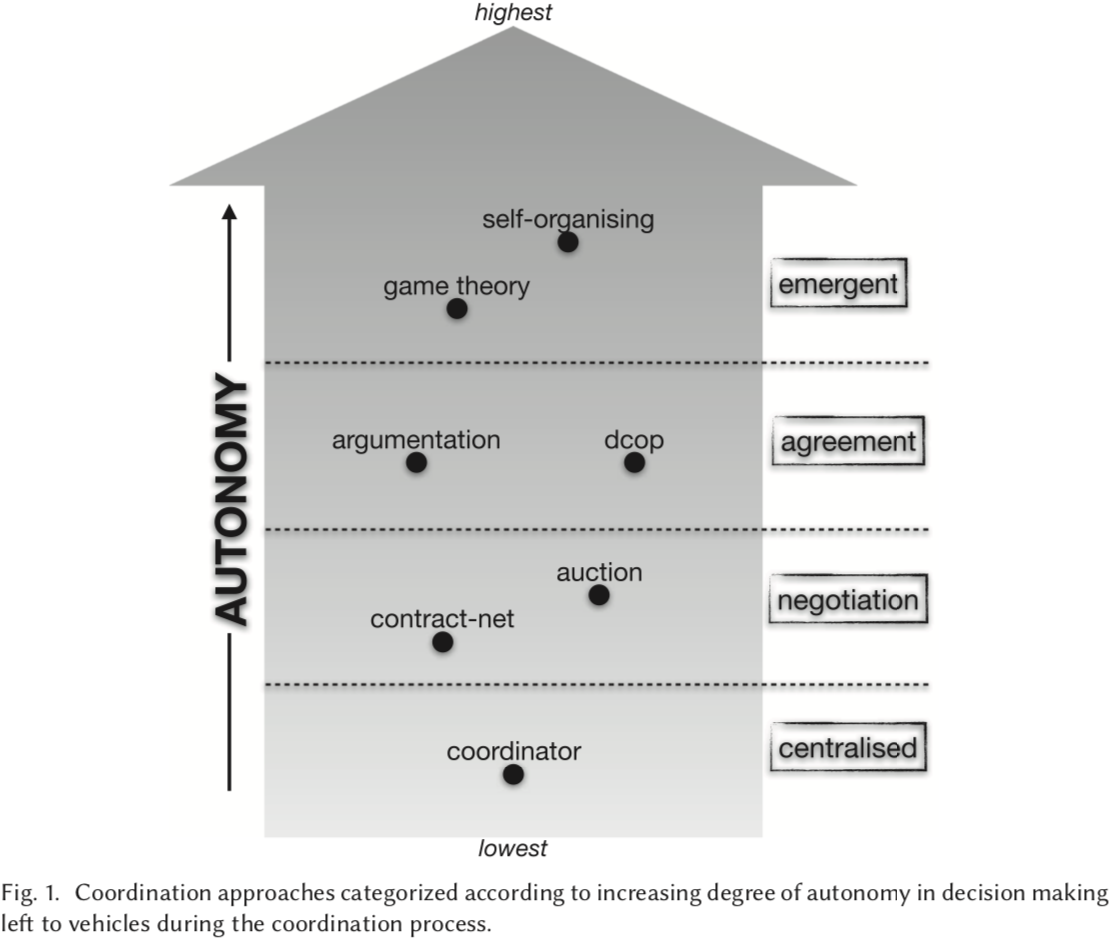
We then shift attention to solutions to such problems, and categorise approaches on a “autonomy scale” ordering the degree of autonomy left to vehciles in decision making during the coordination process (Figure 1).
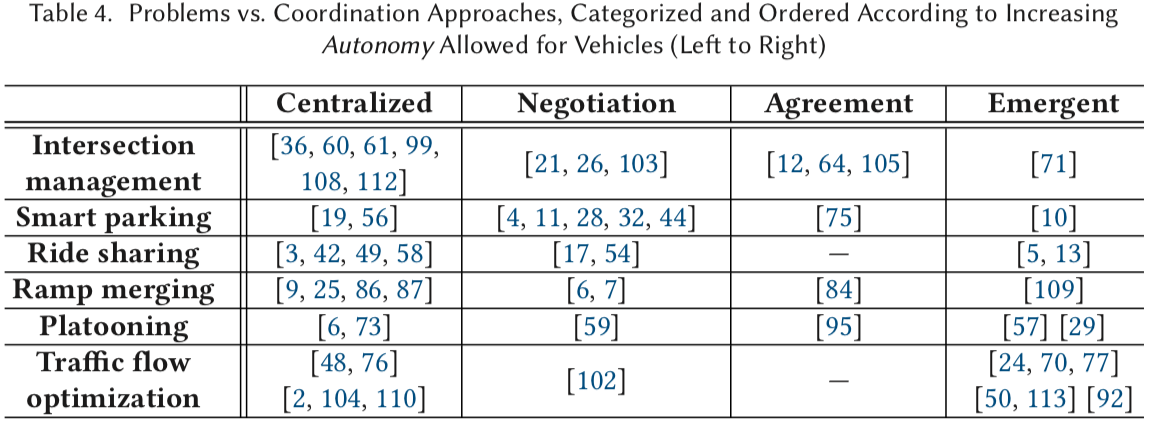
Finally, we frame selected papers from the literature in the defined autonomy classes (Table 4).
Hope you enjoy reading, and contact me for any further inquiry :)