Dear fellow researchers, ECAI’25 just concluded, and with it also its workshops, too. At the workshop AREA, Giovanni Briglia (and we co-authors, too) had a very nice surprise: his very first best paper award :) Of course, we hope that’s just the start for him 🚀
Giovanni presented the following paper about causal multi-agent reinforcement learning applied to multi-robot systems (📖 proceedings here):
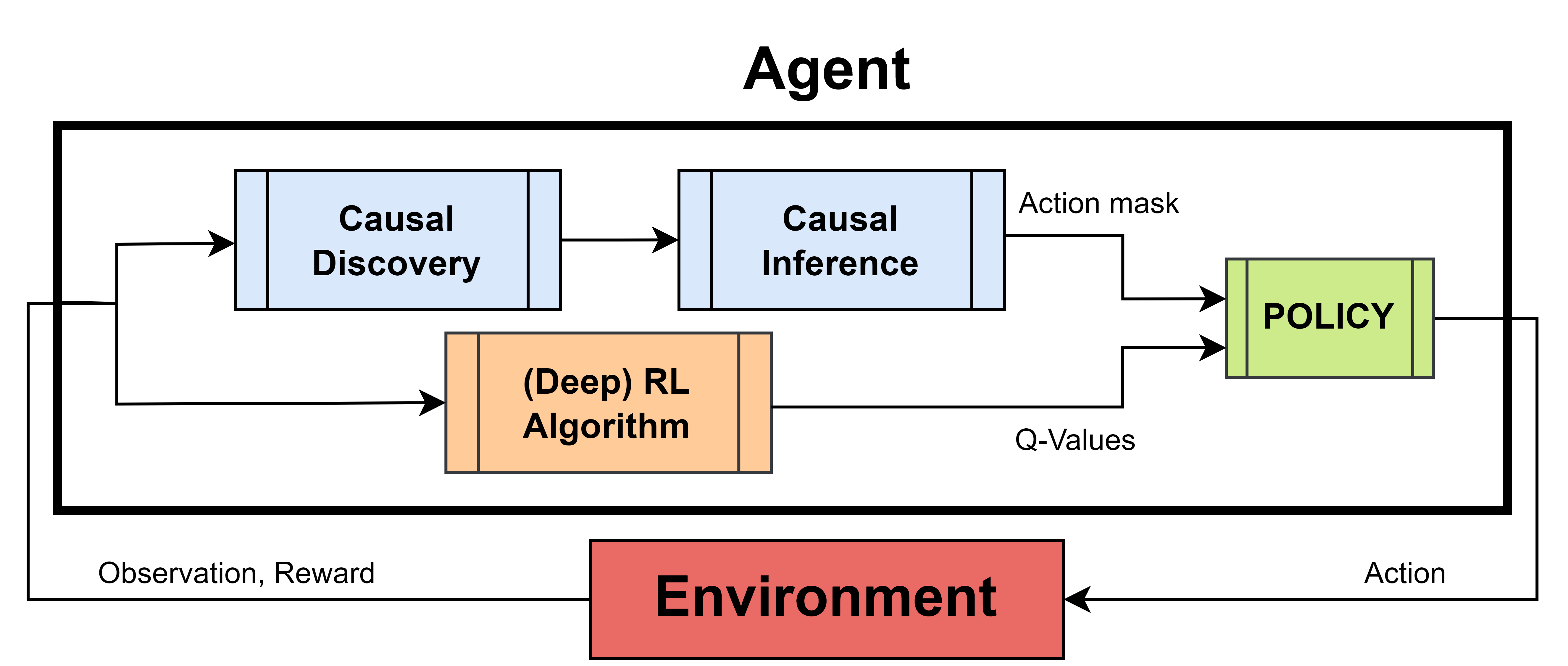
When it comes to multi-robot systems (MRS) 🤖, Reinforcement Learning (RL) faces a few challenges, among which is the risk of performing dangerous actions and learn unsafe policies. Hence, we augmented standard RL algorithms with causal discovery and inference 🔍, enabling robots to: 🚫 Avoid risky actions and 🧭 Predict outcomes more reliably :)
On purpose, we designed a modular causal augmentation pipeline that:
- 📊 Learns a core causal model from robot-environment interactions
- 🧮 Uses causal inference to filter unsafe or suboptimal actions
- 🧠 Integrates seamlessly with popular RL algorithms like IQL, VDN, and Qmix
By testing on the 🧭 Navigation, 🐦 Flocking, and🚦 Give-Way scenarios taken from the VMAS simulator, we observed three key results:
- ✅ Improved safety: Fewer risky actions and collisions
- 📉 Reduced variance in performance
- ⚖️ Mixed outcomes depending on task complexity and algorithm cooperation level
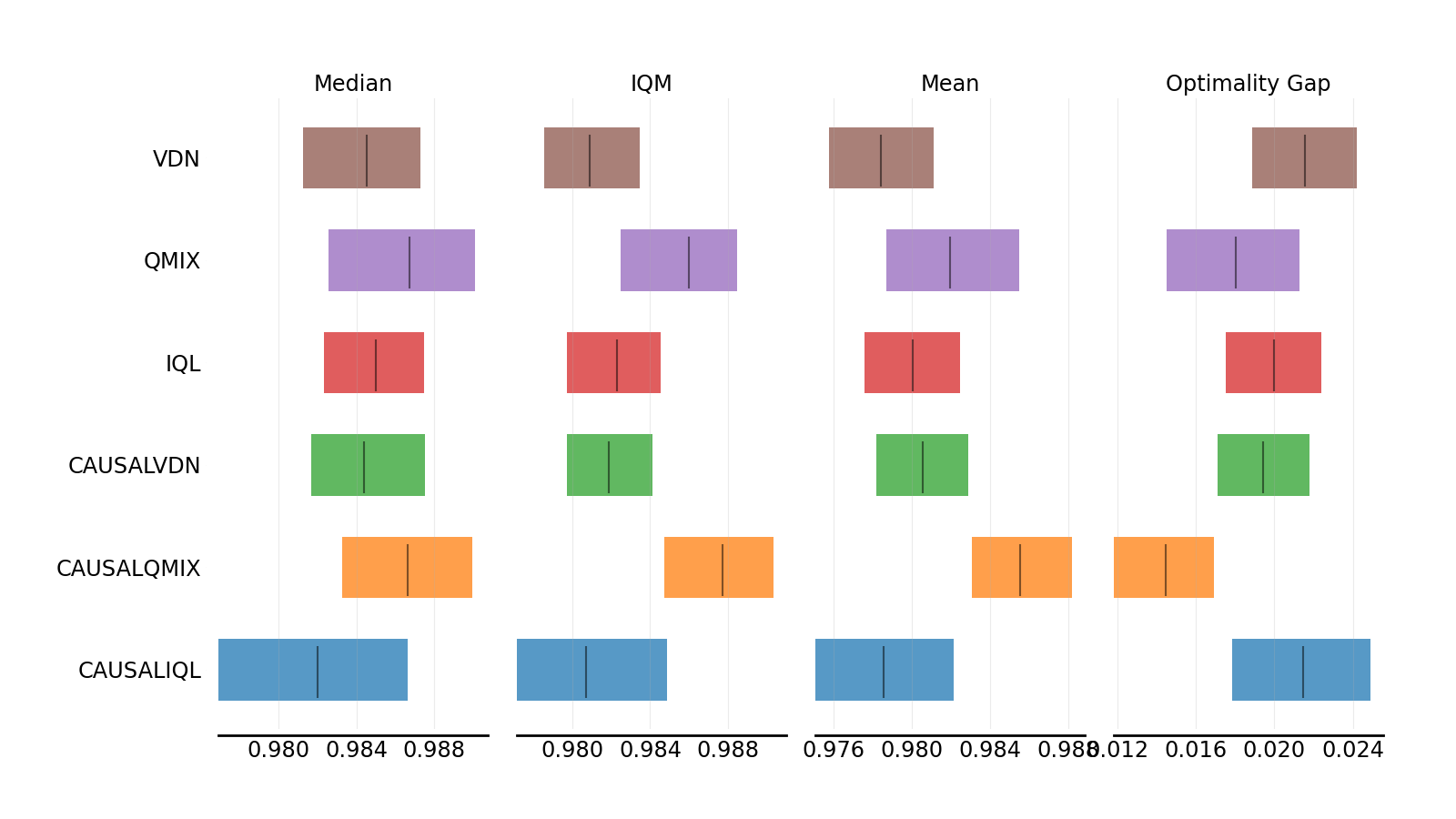
The takeaway message is that causal learning and reasoning can enhance safety and performance in MRS, but that collaborative causal discovery is likely to unlock even better results!
Feel free to contact me for a pre-print, any inquiry, or even better to join us in this research :) 📂 Code & experiments: https://github.com/Giovannibriglia/CausalBenchMARL
Peace.